3 Scheduling
Basic
Design Objectives
- Response Time: the time from when the job arrives to the first time it is scheduled()
- Turnaround time: total time needed to complete a job()
- Fairness: give each thread its fair share
Assumptions
- Each job runs for the same amount of time
- All jobs arrive at the same time
- Once started, each job runs to completion
- All jobs only use the CPU (no I/O)
- The run-time of each job is known
Policies
FCFS
First-Come-First-Served
Relax assumption 1: jobs take the same amount of time
Consider ,, sequence of scheduling
- Average response time for (1): 17
- Average response time for (2): 3
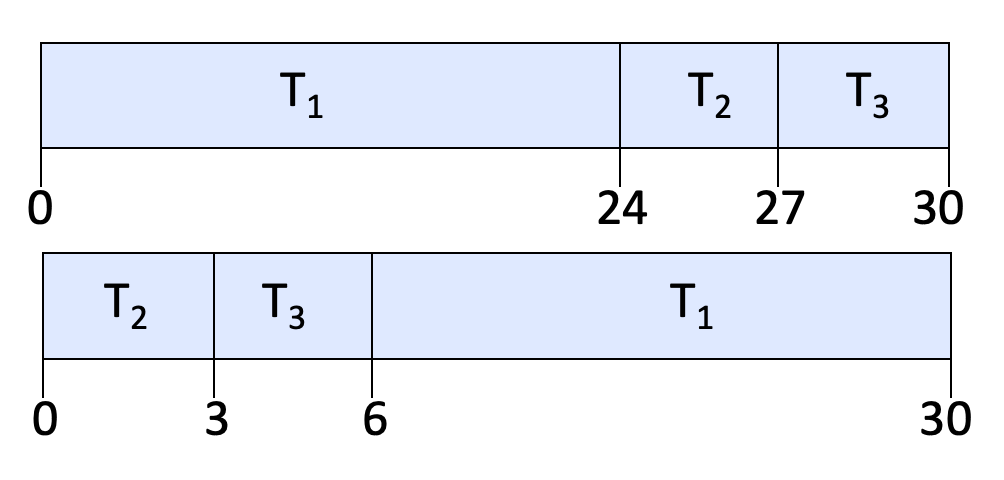
Problem: Short processes stuck behind long processes
SJF
Shortest Job First->We can choose(2)
Relax assumption 2: All jobs arrive at the same time
SRTF
Shortest Remaining Time First
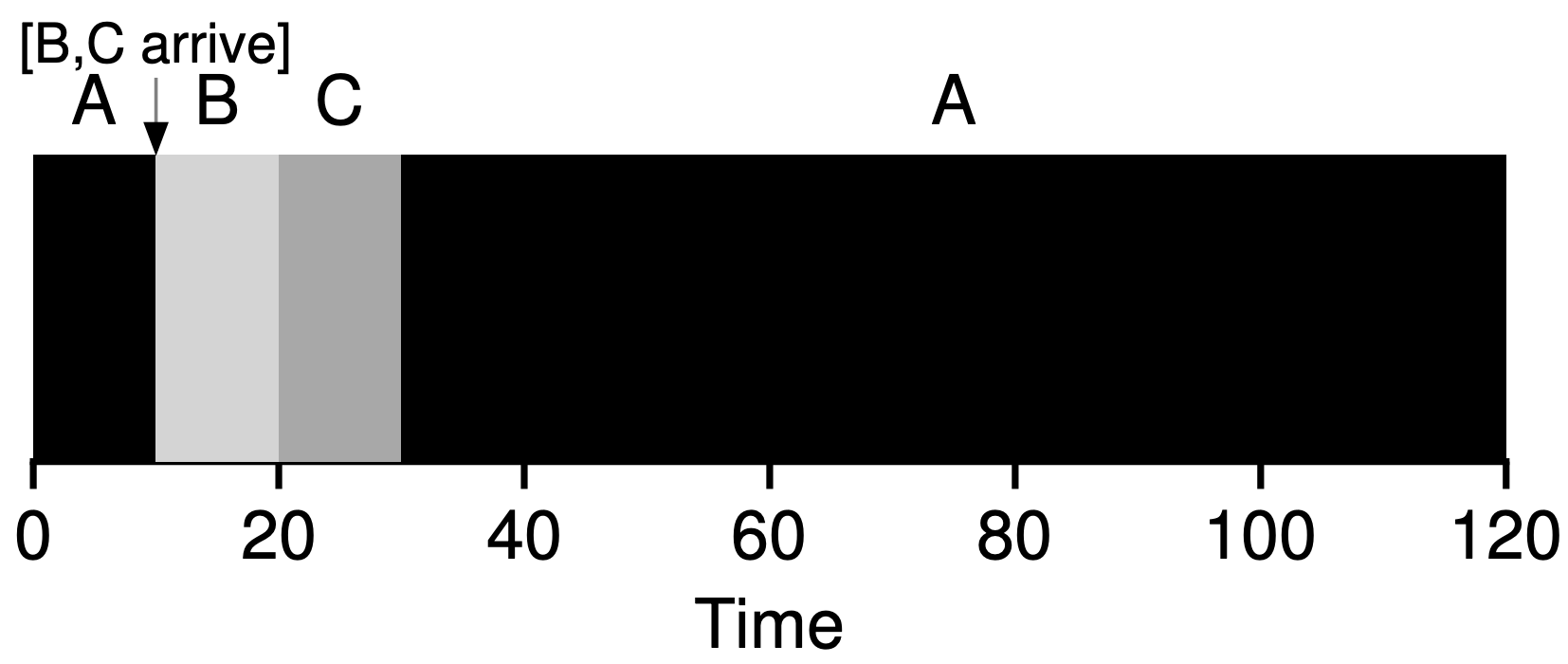
Relax assumption 3: Once started, each job runs to completion
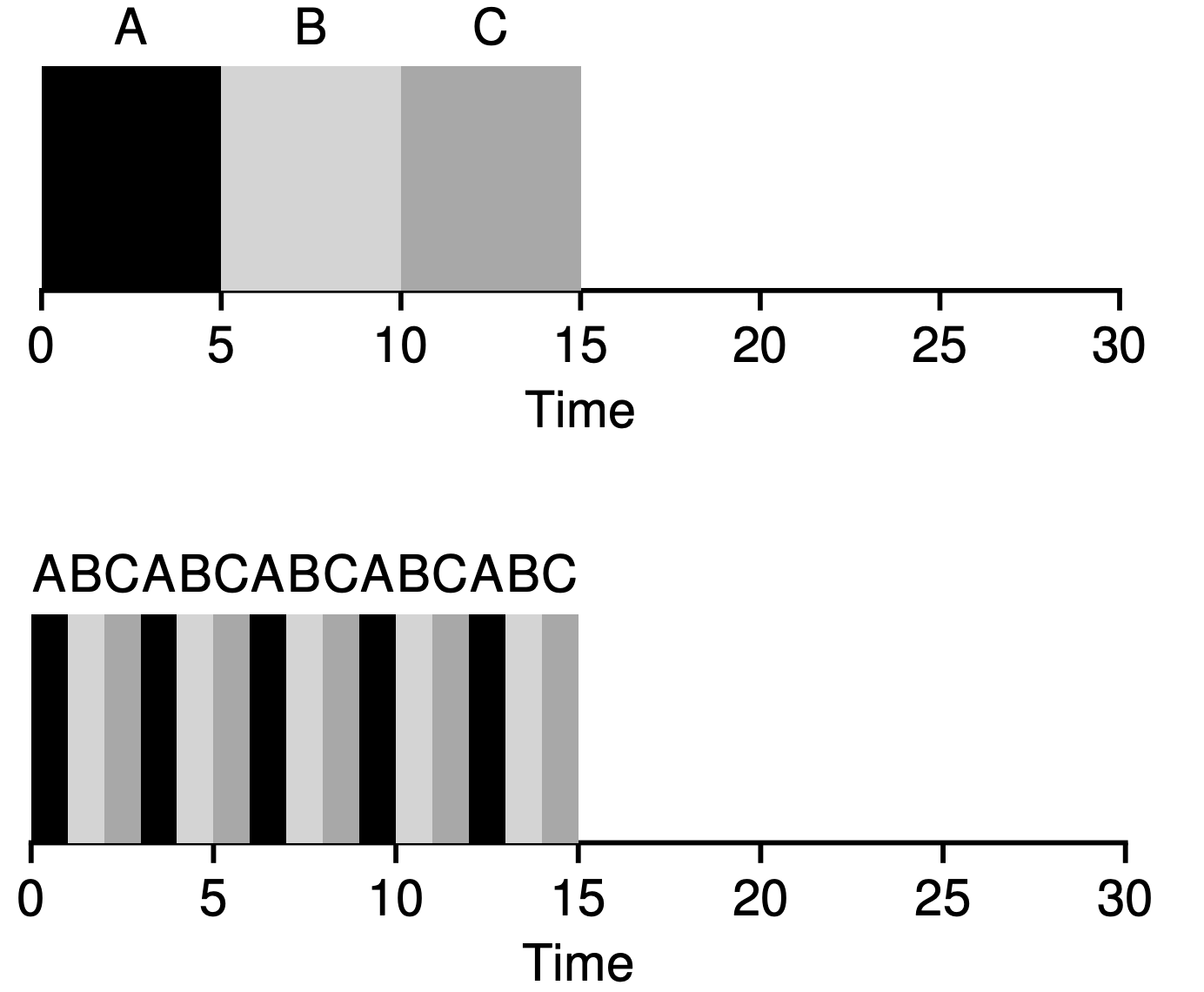
RR
Round Robin
- Give out small units of CPU time ("time quantum")
- When quantum expires, preempt, and schedule
- Round Robin: add to end of the queue
- Each of N processes gets ~1/N of CPU (in window)
- With quantum length Q ms, process waits at most (N-1)*Q ms to run again
- Downside: More context switches
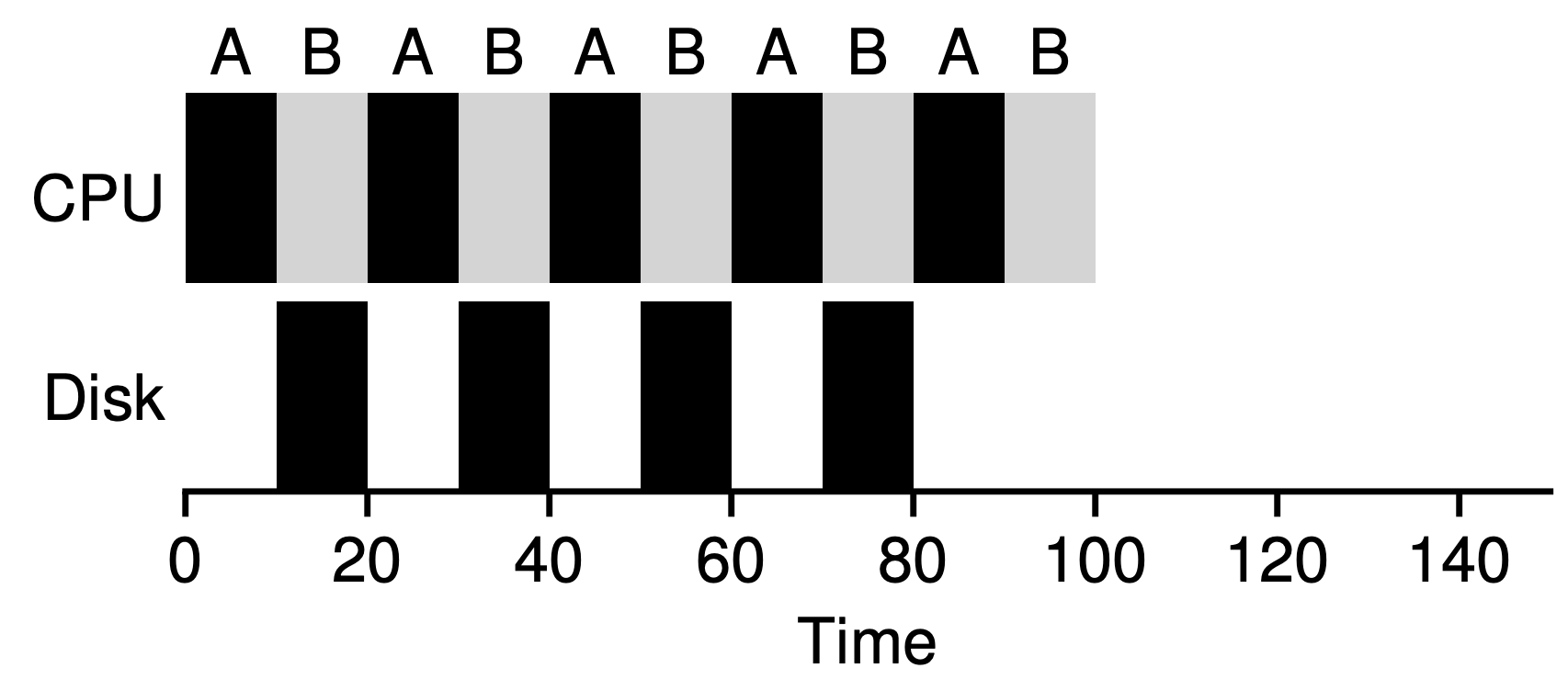
Relax assumption 4: All jobs only use the CPU (no I/O)
with SRTF, we treat each sub-job as an independent one
Relax assumption 5: The run-time of each job is known
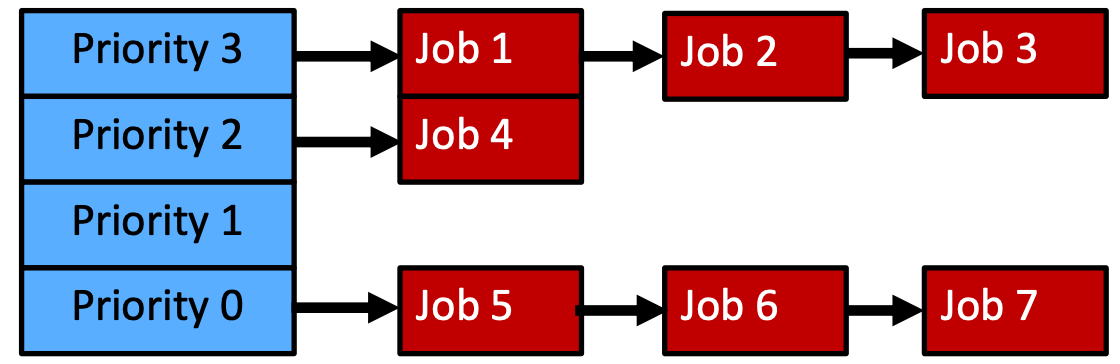
MLFQ
Static Priority Scheduling
Setting priorities: I/O bound (interactive) jobs need higher priorities, and the priorities for CPU bound jobs should be lower.
- If Priority(A) > Priority(B), A runs
- If Priority(A) = Priority(B), A & B run in RR
Problem:
- Low priority thread might never run
- Deadlock: A high-priority thread H becomes ready to run when a low-priority thread L is in the critical section, H waits forever->Medium Priority will be chosen
DeadLock Solution: Priority inheritance
low-priority thread inherits the priority of the high-priority thread when it has the lock
Multi-Level Feedback Queue
- If Priority(A) > Priority(B), A runs
- If Priority(A) = Priority(B), A & B run in RR
- When a job enters, it has the highest priority
- Job Exceeds Quantum: Drop to lower queue(CPU Bound)
- Job Doesn't Exceed Quantum: Raise to higher queue(I/O Bound)
- After some time period, move all the jobs in the system to the topmost queue (CPU-bound jobs may never run)
More scheduling policy
Linux O(1)
- 140 priorities in total, 200 ms (highest priority) to 10 ms time slice
- Active and expired queues at each priority,each element in the queue is a linked list of threads
- threads in a certain priority: round-robin fashion
- when a thread’s time slice expires, it is moved to the expired array, with an adjustment to its priority level
Static priority set by "nice": initial priority
- nice values range from -20 to 19 (mapped to 100 to 139 in the runqueue)
- higher value -> lower priority
- default priority: 0 (mapped to 120)
- can be changed via the nice() system call
Active and expired separate priority queues:
The active and expired priority arrays will be swapped when there are no threads in the active array
Multiprocessor scheduling
Migrating jobs from one CPU to another requires a cost of invalidating and repopulating caches — so we don’t wish to do this often
Cache affinity: try to avoid migration of jobs from one CPU to another(right)
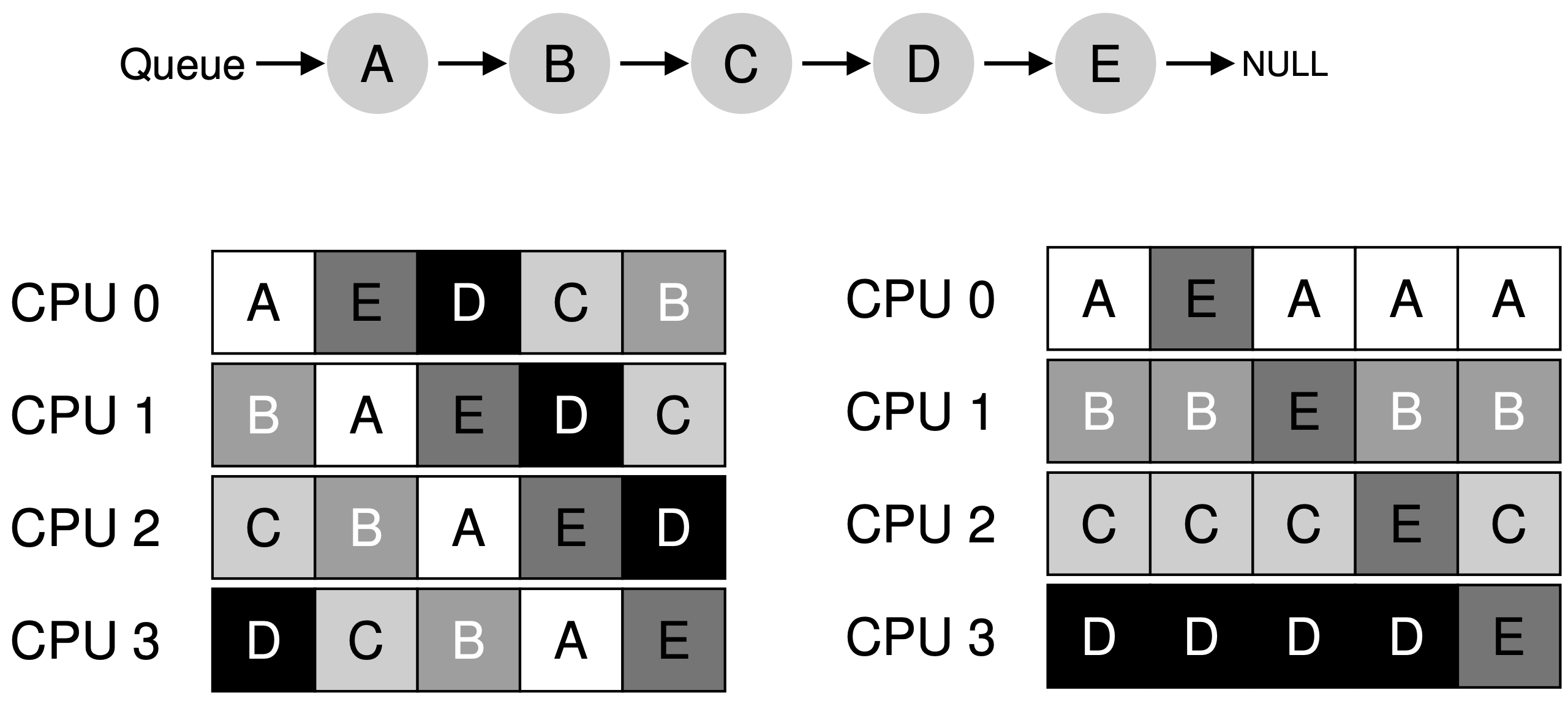
We don’t wish to leave a CPU idle while another CPU is too busy with all its jobs
Load balancing: try to keep the workload evenly distributed